学科科研
 |
机械工程学科方向(机械工程)1.车辆结构设计与系统动力学 新能源车辆与传统车辆在车身、底盘、总成、动力系统等方面差异较大,其种类包括商用车、乘用车、公交车、观光车、物流配送车、电动挖掘机与装载机等,存在多样化与个性化的需求,根据应用场景需求的不同,开展车辆零部件及整车结构设计、结构优化、轻量化、动力学特性、振动与噪声、操控稳定性和安全性等方面的研究。
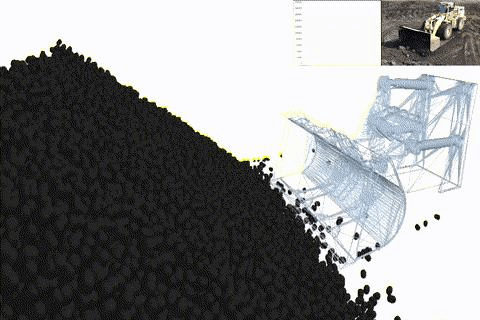
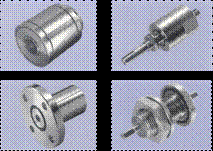
该方向主要解决的科学或工程问题: (1)新能源车辆结构设计与动力系统研究 围绕不同类型车辆对车身、底盘、覆盖件、总成等的要求,采用理论分析、数值仿真与实验测试相结合的方法,开展结构与机构设计、运动学与动力学、刚度与强度、振动与噪声、结构优化等的研究,重点关注基于轮边\轮毂电机新能源车辆的结构设计、动力学特性与稳定性。 (2)面向物料多样化的铲装机械作业装置高效节能关键技术及应用 围绕工程机械作业阻力准确描述、作业过程实验数据获取、作业装置高效节能设计三大难题,研究机械产品和装备动力学特性规律,解决机械零部件设计制造过程与质量控制相关工程问题。 (3)磁流体密封结构设计与车辆减振结构研究 针对车辆、工程机械、大型装备等对密封件的需要,根据高性能高稳定性磁流体制备、表征、动力学与控制技术及其在减振降噪技术中的问题,基于纳微磁性颗粒的磁流体制备技术及其流变学特性,开展磁流体密封结构的设计、研制与工程化应用。 2.新能源电池制备和智能网联电驱动与电拖动技术 为提高新能源车辆的续航问题,开展基于高电导率电子级石墨烯粉体、低缺陷,厚度薄的锂离子电池研发,开展新能源车辆的驾驶室温控、电池包温控、电机控制器与电机冷却以及发动机冷却(混动车)的整车热管理系统的设计、开发与优化,提高新能源汽车的热管理性能,研究电池soc估算方法以及均衡控制方法,提高新能源车辆电池包的使用寿命和续航里程。
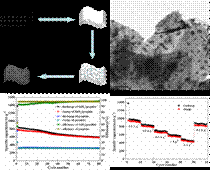
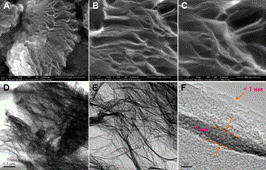
该方向主要解决的科学或工程问题: (1)高安全、快速充电、高能量密度和低成本的全天候锂离子电池研发 利用插层金属氧化物结构和去溶剂化机理解决动力锂离子电池快充和安全性等技术难题,利用材料、化学、电子等技术应用,提高硅基材料在负极中的占比,电解液方面,重点发展凝胶和固态材料,实现锂离子电池反应机理和性能参数方面的技术突破。 (2)固态二次电池与氢燃料动力电池膜电极技术 研发具有更高理论能量密度和更低理论成本的钠离子电池、锂硫电池等,提升电化学理论研究科技水平与深度。开发固态二次电池,利用突破性的固体保护涂层技术,组成聚合物石墨烯/金属氧化物复合材料,用来抑制锂枝晶的生成,提高锂离子导电率,应用于锂离子电池正极材料。 (3)新能源车辆整车热管理系统研究 根据热力系统的设计性能,温度控制稳定性与整车能耗,开展新能源汽车的驾驶室温控、电池包温控、电机控制器与电机冷却以及发动机冷却(混动车)的整车热管理系统的设计、开发与优化,提高新能源汽车的热管理性能,提高新能源汽车电池包的使用寿命和减缓续航里程的衰减。 3.智能车辆与车路协同控制系统 基于摄像头、激光雷达、毫米波雷达等多传感信息融合的智能车辆控制算法研究,提升新能源车辆的智能化水平,在此基础上,借助新一代信息和通信技术,利用多元异构的传感器信息获取车辆周围的感知环境和动态信息,基于5g技术实现车内、车与车、车与路、车与人、车与服务平台的多方位网络连接,实现车路协同控制,进一步提升车辆的驾乘安全性、自动驾驶能力和智能化水平。
该方向主要解决的科学或工程问题: (1)智能车辆传感器开发与信息融合技术 为提高车辆自动驾驶的智能化水平,开展图像、测距等车载专用传感器的开发以及相关的车身、底盘结构设计与优化,开发基于摄像头、激光雷达、毫米波雷达等多传感信息融合的智能车辆控制算法。 (2)智能车辆自动驾驶的车载边缘计算技术 根据智能车辆自动驾驶安全性的需求,构建在车辆行驶过程中的通信临时中断后的智能保护机制,包括基于当前路况感知环境的主动评价函数、自主路径规划策略和整车多域控制器功能冗余重构等。 (3)车路协同数据通信与智能保护算法 构建基于特定工况下的obu(车载单元)到rsu(路侧感知单元)的任务卸载机制,同时,针对精确地理定位和路径规划、基于深度学习的目标识别和检测、图像预处理和特征提取、传感器融合和目标跟踪等不同任务负载,开发相应的算法以实现对其的异构计算。 4.工程与农用机械设计与协同控制技术 根据现代战争、智能巡检、特色农业、医疗康复等领域对智能化装备的现实需求,促进机械、车辆、力学、电子、电气、控制相关理论与技术的交叉融合,开展无人战车、矿山机械、农业机械、康复机器人等特种装备的机构设计与控制系统开发,借助新一代信息和通信技术,实现基于多传感信息融合的多机编队与协同作业控制,提升装备的智能化水平。
该方向主要解决的科学或工程问题: (1)智能化特种装备的机构运动与动力学特性研究 根据现代战争、智能巡检、特色农业、医疗康复等领域的具体需求,开展机构底盘、动力、传动等移动平台的设计与开发,开展机构运动与动力学建模、数值模拟与实验测试研究,实现能够满足个性化需求的移动式特种装备的开发。 (2)基于5g技术的多机协同作业控制系统研究 该方向重点解决多传感器标定、语义地图构建、3d-slam、融合感知、多传感器融合定位、路径规划、车身控制、多机协作、自动充电等智能移动装备的核心技术问题,实现具有自主导航定位、自主避障、自动充电、自主路径规划、自动驾驶、多车智能调度等强大功能控制系统开发。 (3)多机协同作业下的信息化管理系统 为实现多机作业过程中的统一指挥调度问题,同时充分发挥5g通信低时延的特点优势,在实现装备远程控制系统的基础上,开发能够与各作业装备实时通信的指挥调度系统,及时获取各装备作业过程中的各类作业数据,结合大数据、人工智能等技术实现轨迹跟踪、路径优化、智能调度与协调作业等。 (更新于:2024年3月) |
邮编:545616
联系电话:0772-2687202
联系欧洲杯买球官方网站:广西柳州市鱼峰区官塘大道 19 号